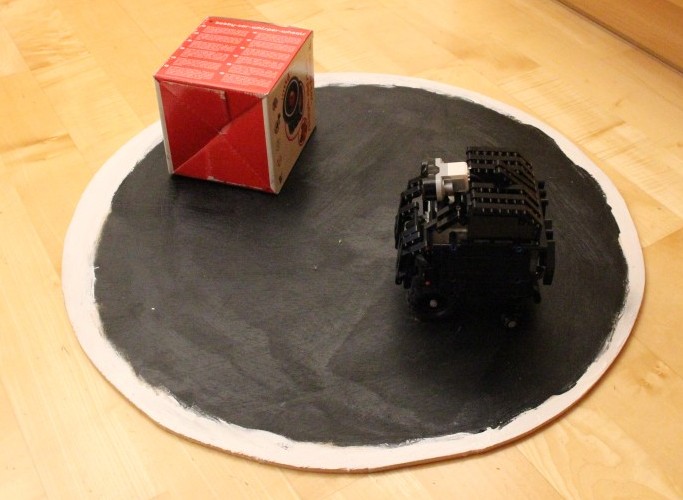
P29 is based on LEGO Mindstorm EV3 CPU. It has mainly been designed for the robotchallenge competition in April 2015. Background is educational: introduction of robotics to the kids and collection of first experiences.
Its mechanical design comprises a core cpu/movement unit and skins mainly of black LEGO technics parts. The skin approach is derived from stealth technology ideas, but mainly because it looks cool ;-) It uses two sensors, a front ultrasonic sensor to detect other (moving) objects, and a bottom color sensor to detect the edge of the playground. The robot used two standard Mindstorm drives.
The software itself implements several phases:
1. Waiting 5 seconds after starting the programm as required for the LEGO sumo competition
2. Turning around and looking for other objects (the enemy!)
3. If enemy is found moving forward
4. If enemy is lost moving backward for about 10cm for re-orientation
Steps 2,3 and 4 are repeated in an infinite loop.
During phases 3 and 4, the robot additionally verifies the reflected light to detect the white edge of the playground

LEGO, LEGO Mindstorm and the LEGO logo are copyrights of the Lego group. Thanks to this company for providing good and valueable toys for many centuries.
Thanks also to all organizations who contribute to the robotchallenge in Vienna.
Thanks Rado Kovac for giving us the hint about this event
And of course thanks to Lukas, Dorothea and Jakob for their support on construction, testing, creating the test playground and sorting Lego parts